TankKinematics
data class TankKinematics(val trackWidth: <Error class: unknown class>) : RobotKinematics<TankKinematics.TankWheelIncrements<*>, TankKinematics.TankWheelVelocities<*>>
Kinematics for a tank (differential) drive train.
Parameters
trackWidth
distance between wheels on opposite sides; see the diagram below 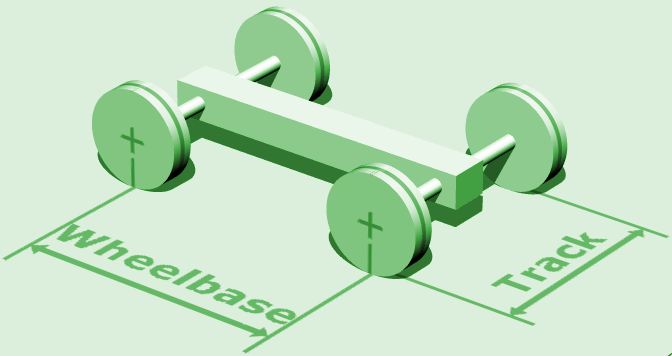
Types
Link copied to clipboard
data class TankWheelIncrements<Param>(val left: <Error class: unknown class><Param>, val right: <Error class: unknown class><Param>)
Link copied to clipboard
data class TankWheelVelocities<Param>(val left: <Error class: unknown class><Param>, val right: <Error class: unknown class><Param>)
Functions
Link copied to clipboard
abstract fun <Param : DualParameter> forward(increments: TankKinematics.TankWheelIncrements<*>): Twist2dDual<Param>
Performs forward kinematics: computes the twist (pose delta) that occurred based on the given wheel increments.
abstract fun <Param : DualParameter> forward(velocities: TankKinematics.TankWheelVelocities<*>): PoseVelocity2dDual<Param>
Performs forward kinematics: computes the chassis velocity required to achieve the given wheel velocities.
open fun <Param> forward(increments: TankKinematics.TankWheelIncrements<*>): <Error class: unknown class><Param>
open fun <Param> forward(velocities: TankKinematics.TankWheelVelocities<*>): <Error class: unknown class><Param>
Link copied to clipboard
abstract fun <Param : DualParameter> inverse(velocity: PoseVelocity2dDual<Param>): WheelVelocities<Param>
Performs inverse kinematics: computes wheel velocities required to achieve the desired robot velocity.
open fun <Param> inverse(velocity: <Error class: unknown class><Param>): TankKinematics.TankWheelVelocities<Param>